03 - Kaiser-Squires: Physics and Practice¶
Learning Objectives¶
By the end of this tutorial, you should be able to:
Explain what the Kaiser-Squires (KS) inversion is reconstructing physically.
Connect core KS assumptions to practical analysis choices in SMPy.
Run KS in SMPy and interpret E/B maps, including smoothing tradeoffs.
Canonical Reference¶
The foundational paper for this method is:
Kaiser, N. & Squires, G. (1993), Mapping the dark matter with weak gravitational lensing, The Astrophysical Journal, 404, 441-450. DOI: 10.1086/172297 ADS: 1993ApJ…404..441K
1) Physics Primer¶
Weak lensing maps how light from background galaxies is distorted by foreground mass.
The local lensing distortion is described by the Jacobian
where:
\(\kappa\): convergence (projected surface-density contrast)
\(\gamma_1, \gamma_2\): shear components
Observed galaxy shapes estimate the reduced shear:
In the weak regime (\(|\kappa| \ll 1\)), we often use \(\mathbf{g} \approx \boldsymbol{\gamma}\).
2) KS Inversion in Fourier Space¶
Define complex shear and convergence:
Kaiser-Squires uses the Fourier-space relation
So the inversion is
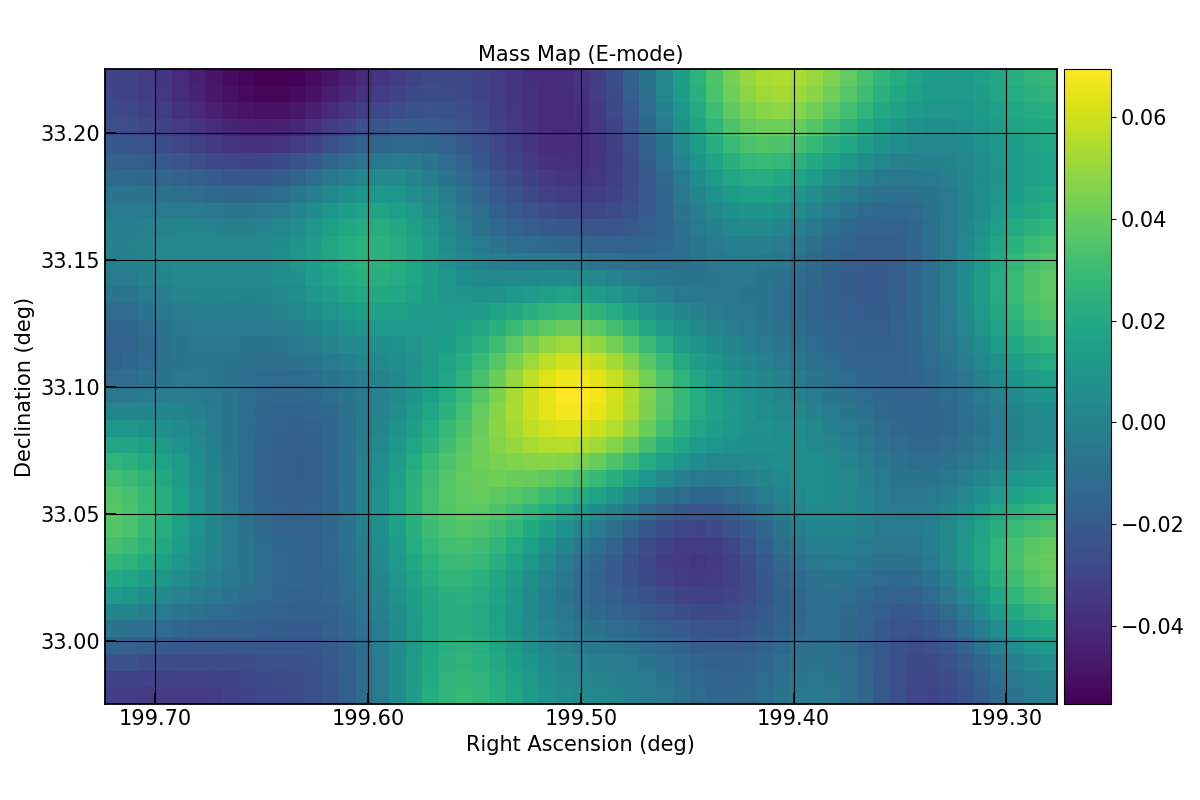
The real part gives E-mode convergence (physical lensing signal), while the imaginary part gives B-mode (often used as a systematics diagnostic).
3) Practical Assumptions and Caveats¶
Important assumptions behind basic KS usage:
Flat-sky approximation (appropriate for modest fields of view).
Finite survey boundaries can leak power and bias edges.
Smoothing reduces noise but also suppresses small-scale structure.
Mass-sheet degeneracy remains a fundamental lensing ambiguity.
This is why diagnostics (especially B-mode behavior and sensitivity to smoothing) are part of good practice.
4) Mapping Physics to SMPy Settings¶
In SMPy, the main KS-relevant controls are:
general.coordinate_system:radecorpixelgeneral.radec.resolution(or APIpixel_scale): angular map resolutionmethods.kaiser_squires.smoothing.sigma(or APIsmoothing): Gaussian smoothing scalegeneral.mode:['E'],['B'], or['E', 'B']
For this tutorial we will run in radec, produce both E and B maps, and compare multiple smoothing values.
5) SMPy Analysis Workflow¶
A standard analysis workflow in SMPy is:
Set data paths and shear/coordinate column names.
Build a
Configfrom method defaults and update the run parameters.Save the config for provenance, then execute
run(config).Inspect E/B outputs and iterate on smoothing and diagnostics.
[1]:
from pathlib import Path
import random
import numpy as np
import pandas as pd
import smpy
from IPython.display import Image, display
from smpy.config import Config
from smpy.run import run
# Set deterministic seeds for reproducible tutorial outputs.
SEED = 42
random.seed(SEED)
np.random.seed(SEED)
def find_repo_root(start: Path) -> Path:
# Walk upward until we find the SMPy repository root markers.
for candidate in [start, *start.parents]:
if (candidate / "setup.py").exists() and (candidate / "smpy").is_dir():
return candidate
raise RuntimeError("Could not locate SMPy repository root.")
# Resolve input/output locations relative to the repository root.
repo_root = find_repo_root(Path.cwd().resolve())
data_file = repo_root / "examples" / "data" / "forecast_lum_annular.fits"
artifacts_dir = repo_root / "examples" / "outputs" / "tutorials"
artifacts_dir.mkdir(parents=True, exist_ok=True)
# Print runtime context for quick verification in notebook output.
print(f"SMPy version: {smpy.__version__}")
print(f"Seed: {SEED}")
print(f"Input data: {data_file}")
print(f"Output root: {artifacts_dir}")
SMPy version: 0.5.0
Seed: 42
Input data: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/data/forecast_lum_annular.fits
Output root: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials
[2]:
base_name = "tutorial03_ks_workflow"
workflow_config = Config.from_defaults("kaiser_squires")
workflow_config.update_from_kwargs(
data=str(data_file),
coord_system="radec",
pixel_scale=0.4,
smoothing=2.0,
g1_col="g1_Rinv",
g2_col="g2_Rinv",
weight_col="weight",
mode=["E", "B"],
save_plots=True,
save_fits=False,
output_dir=str(artifacts_dir),
output_base_name=base_name,
)
workflow_config_path = artifacts_dir / "tutorial03_ks_workflow.yaml"
workflow_config.save_config(workflow_config_path)
result = run(workflow_config)
print("KS workflow run complete.")
print("E map shape:", result["maps"]["E"].shape)
print("B map shape:", result["maps"]["B"].shape)
print("E std:", float(np.nanstd(result["maps"]["E"])))
print("B std:", float(np.nanstd(result["maps"]["B"])))
print("Saved config snapshot:", workflow_config_path)
Configuration saved to: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/tutorial03_ks_workflow.yaml
Convergence map saved as PNG file: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/kaiser_squires/tutorial03_ks_workflow_kaiser_squires_e_mode.png
Convergence map saved as PNG file: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/kaiser_squires/tutorial03_ks_workflow_kaiser_squires_b_mode.png
KS workflow run complete.
E map shape: (38, 57)
B map shape: (38, 57)
E std: 0.042875682598267024
B std: 0.03868921282648928
Saved config snapshot: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/tutorial03_ks_workflow.yaml
[3]:
ks_dir = artifacts_dir / "kaiser_squires"
baseline_e_png = ks_dir / f"{base_name}_kaiser_squires_e_mode.png"
baseline_b_png = ks_dir / f"{base_name}_kaiser_squires_b_mode.png"
print("Baseline SMPy plot outputs:")
print("-", baseline_e_png)
print("-", baseline_b_png)
if baseline_e_png.exists() and baseline_b_png.exists():
display(Image(filename=str(baseline_e_png)))
display(Image(filename=str(baseline_b_png)))
else:
print("Expected PNG outputs were not found. Re-run the previous cell.")
Baseline SMPy plot outputs:
- /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/kaiser_squires/tutorial03_ks_workflow_kaiser_squires_e_mode.png
- /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/kaiser_squires/tutorial03_ks_workflow_kaiser_squires_b_mode.png
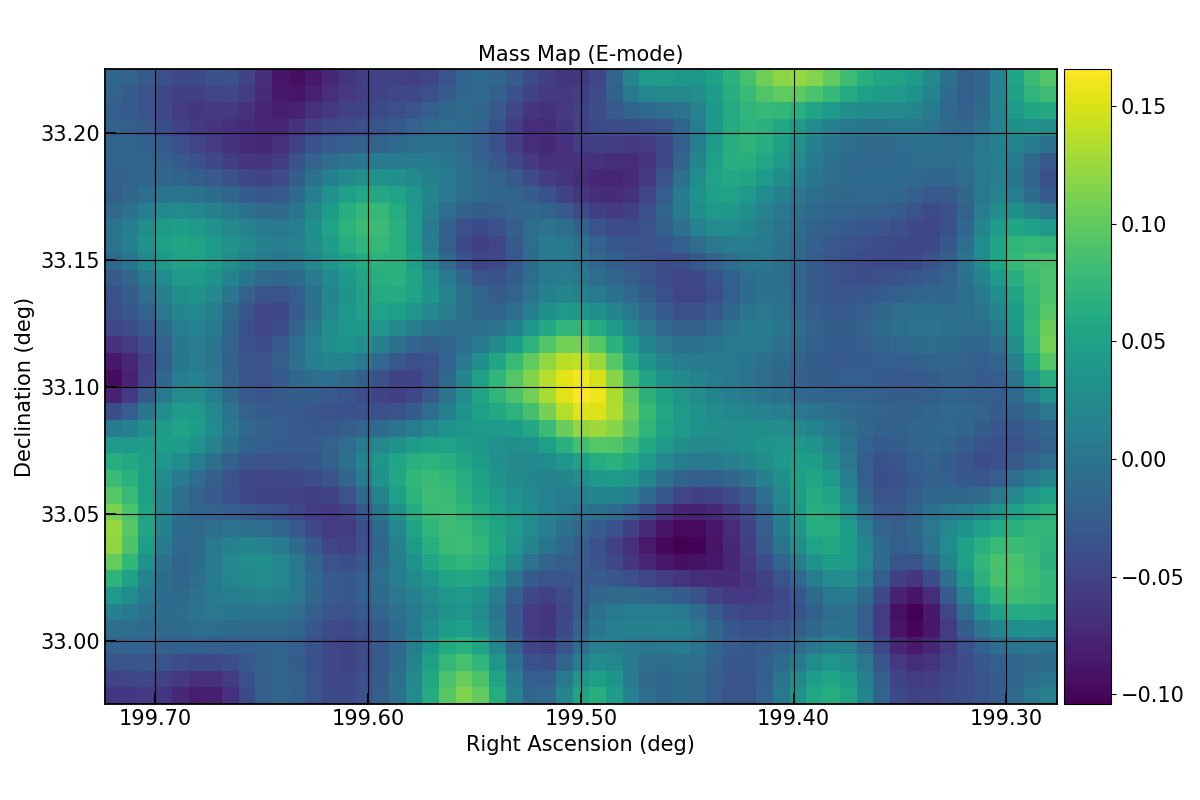
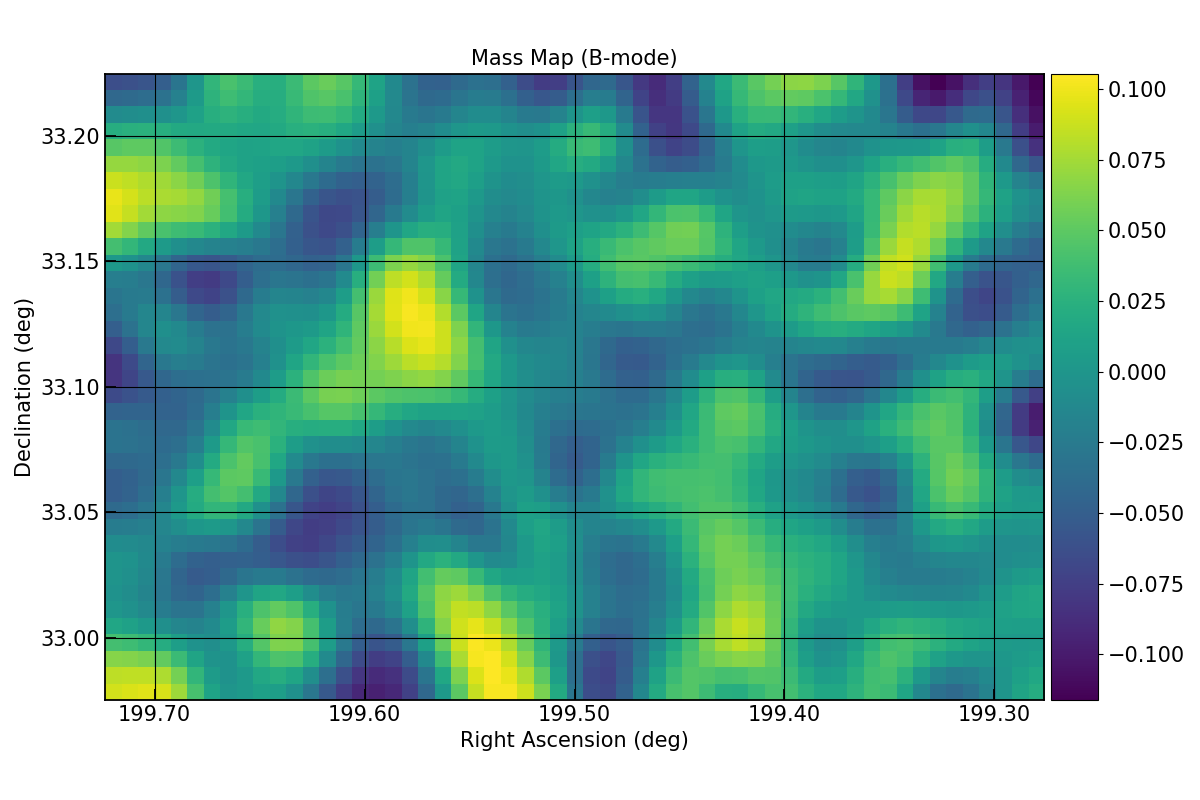
Interpretation (Baseline)¶
The E-mode map is your primary mass-reconstruction product.
The B-mode should generally be weaker and less spatially coherent than E-mode.
A B-mode of similar strength/structure to E-mode is a warning sign to investigate systematics.
For parameter studies, the next section uses the Config API to run a controlled smoothing sweep.
[4]:
smoothing_values = [1.0, 2.0, 4.0]
rows = []
run_records = []
for sigma in smoothing_values:
sigma_tag = str(sigma).replace(".", "p")
run_name = f"tutorial03_ks_sigma{sigma_tag}"
cfg = Config.from_defaults("kaiser_squires")
cfg.update_from_kwargs(
data=str(data_file),
coord_system="radec",
pixel_scale=0.4,
smoothing=sigma,
g1_col="g1_Rinv",
g2_col="g2_Rinv",
weight_col="weight",
mode=["E", "B"],
save_plots=True,
save_fits=False,
output_dir=str(artifacts_dir),
output_base_name=run_name,
)
cfg.validate()
res = run(cfg)
e_map = res["maps"]["E"]
b_map = res["maps"]["B"]
rows.append(
{
"smoothing_sigma": sigma,
"E_std": float(np.nanstd(e_map)),
"B_std": float(np.nanstd(b_map)),
"E_max_abs": float(np.nanmax(np.abs(e_map))),
"B_max_abs": float(np.nanmax(np.abs(b_map))),
"B_to_E_std_ratio": float(np.nanstd(b_map) / np.nanstd(e_map)),
}
)
run_records.append(
{
"sigma": sigma,
"run_name": run_name,
"e_png": ks_dir / f"{run_name}_kaiser_squires_e_mode.png",
"b_png": ks_dir / f"{run_name}_kaiser_squires_b_mode.png",
}
)
summary = pd.DataFrame(rows).sort_values("smoothing_sigma")
summary_path = artifacts_dir / "ks_smoothing_summary.csv"
summary.to_csv(summary_path, index=False)
print(f"Saved summary table: {summary_path}")
summary
Convergence map saved as PNG file: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/kaiser_squires/tutorial03_ks_sigma1p0_kaiser_squires_e_mode.png
Convergence map saved as PNG file: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/kaiser_squires/tutorial03_ks_sigma1p0_kaiser_squires_b_mode.png
Convergence map saved as PNG file: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/kaiser_squires/tutorial03_ks_sigma2p0_kaiser_squires_e_mode.png
Convergence map saved as PNG file: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/kaiser_squires/tutorial03_ks_sigma2p0_kaiser_squires_b_mode.png
Convergence map saved as PNG file: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/kaiser_squires/tutorial03_ks_sigma4p0_kaiser_squires_e_mode.png
Convergence map saved as PNG file: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/kaiser_squires/tutorial03_ks_sigma4p0_kaiser_squires_b_mode.png
Saved summary table: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/ks_smoothing_summary.csv
[4]:
| smoothing_sigma | E_std | B_std | E_max_abs | B_max_abs | B_to_E_std_ratio | |
|---|---|---|---|---|---|---|
| 0 | 1.0 | 0.079732 | 0.079208 | 0.339032 | 0.287085 | 0.993431 |
| 1 | 2.0 | 0.042876 | 0.038689 | 0.165443 | 0.116255 | 0.902358 |
| 2 | 4.0 | 0.021592 | 0.016111 | 0.069374 | 0.061914 | 0.746153 |
[5]:
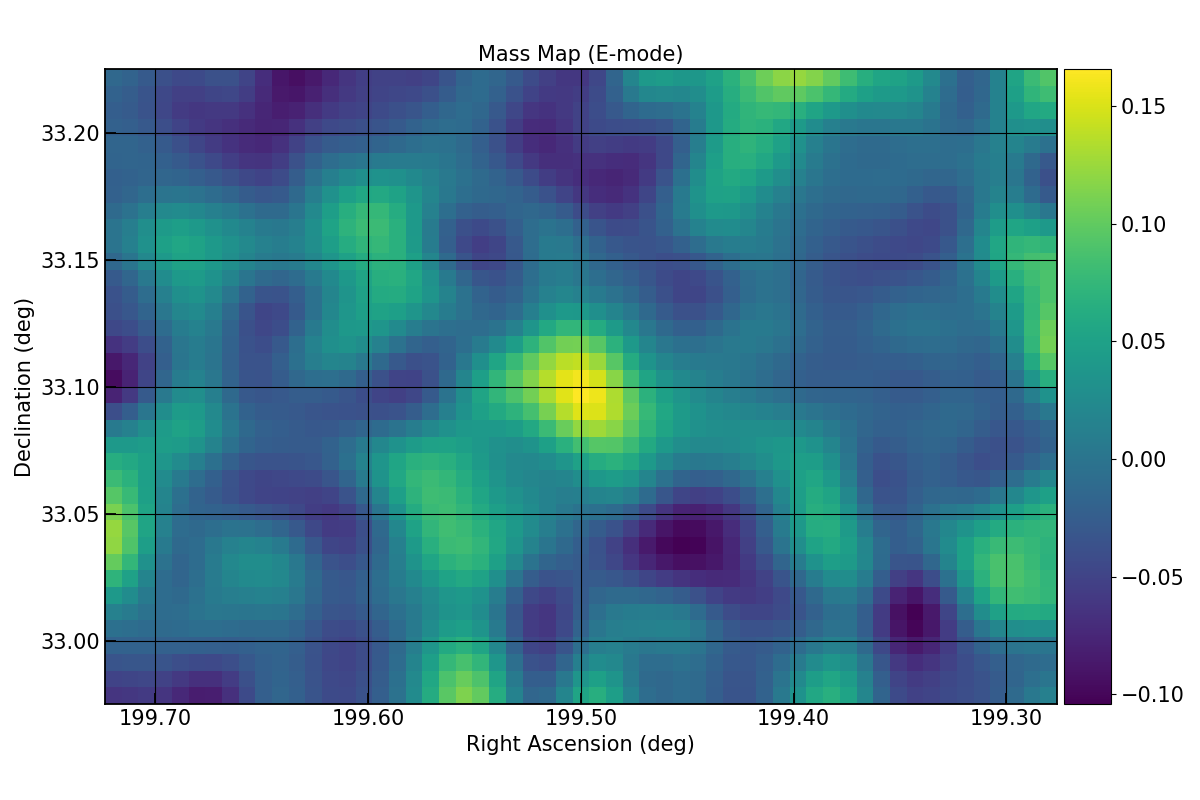
print("E-mode outputs across smoothing values:")
for record in run_records:
print(f"sigma={record['sigma']}: {record['e_png']}")
if record["e_png"].exists():
display(Image(filename=str(record["e_png"])))
else:
print(" Missing file; rerun smoothing cell above.")
E-mode outputs across smoothing values:
sigma=1.0: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/kaiser_squires/tutorial03_ks_sigma1p0_kaiser_squires_e_mode.png
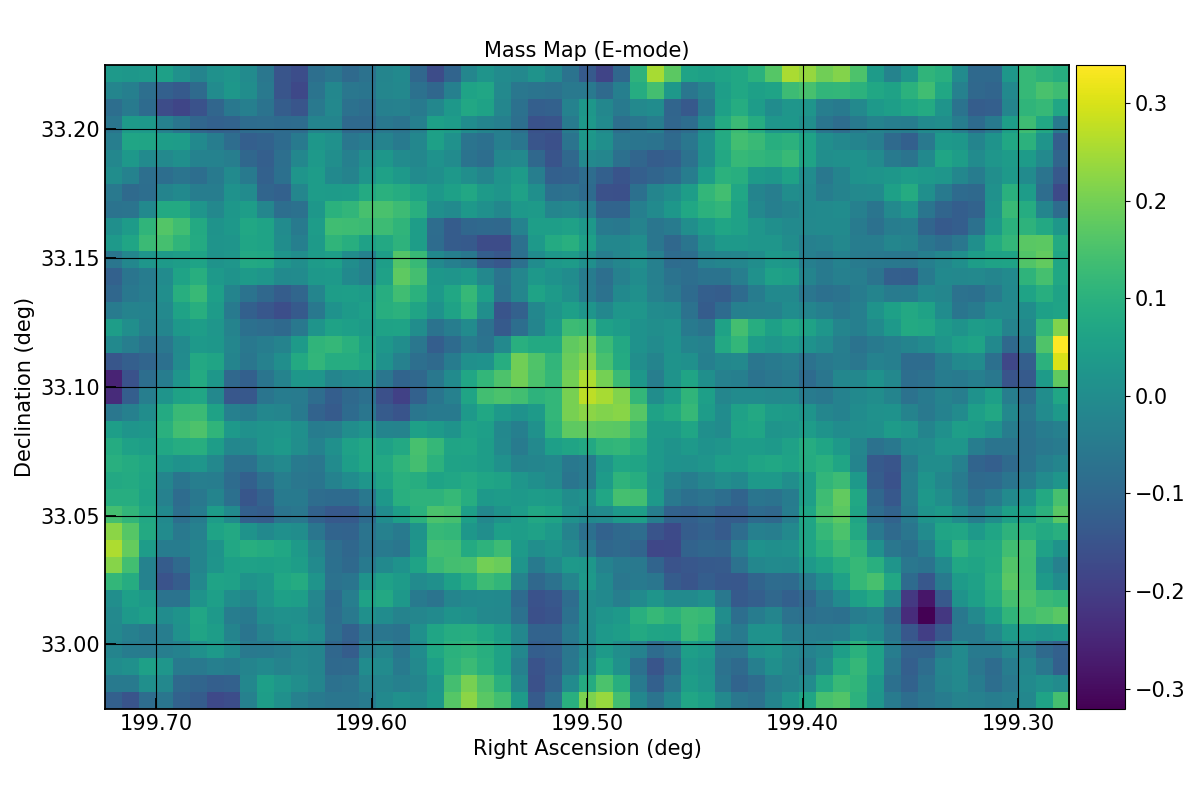
sigma=2.0: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/kaiser_squires/tutorial03_ks_sigma2p0_kaiser_squires_e_mode.png
sigma=4.0: /home/docs/checkouts/readthedocs.org/user_builds/smpy-docs/checkouts/latest/examples/outputs/tutorials/kaiser_squires/tutorial03_ks_sigma4p0_kaiser_squires_e_mode.png
References¶
Kaiser, N. & Squires, G. (1993), The Astrophysical Journal, 404, 441-450. DOI: 10.1086/172297
ADS entry: 1993ApJ…404..441K